From Raw Streams
to Real Insight
Ingest, manage, and analyze ROS bag data at scale. From multi-sensor streams to complex robotics workloads, BringUp Data simplifies debugging, post-processing, and exploration so teams move faster from data to decisions.
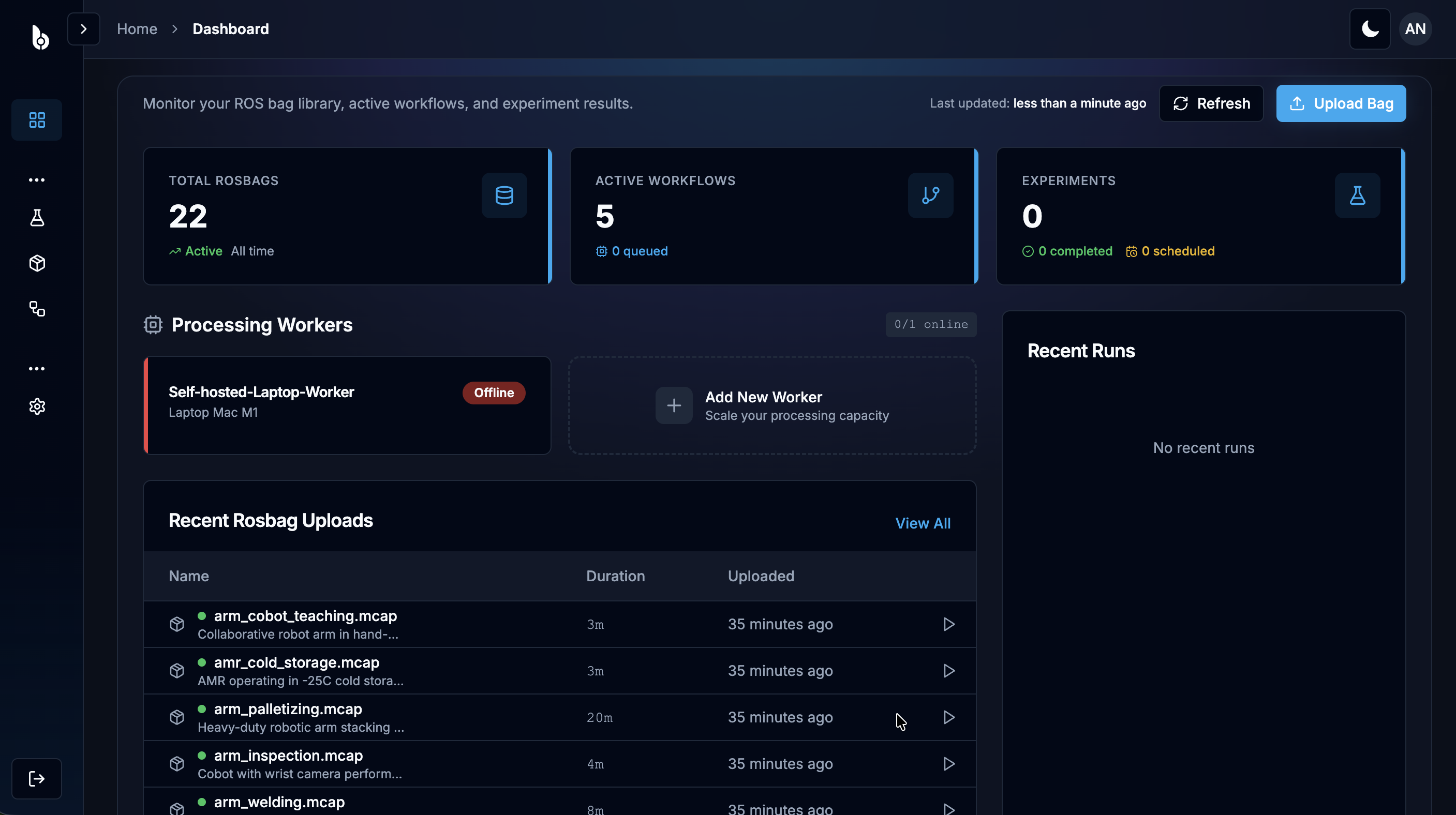
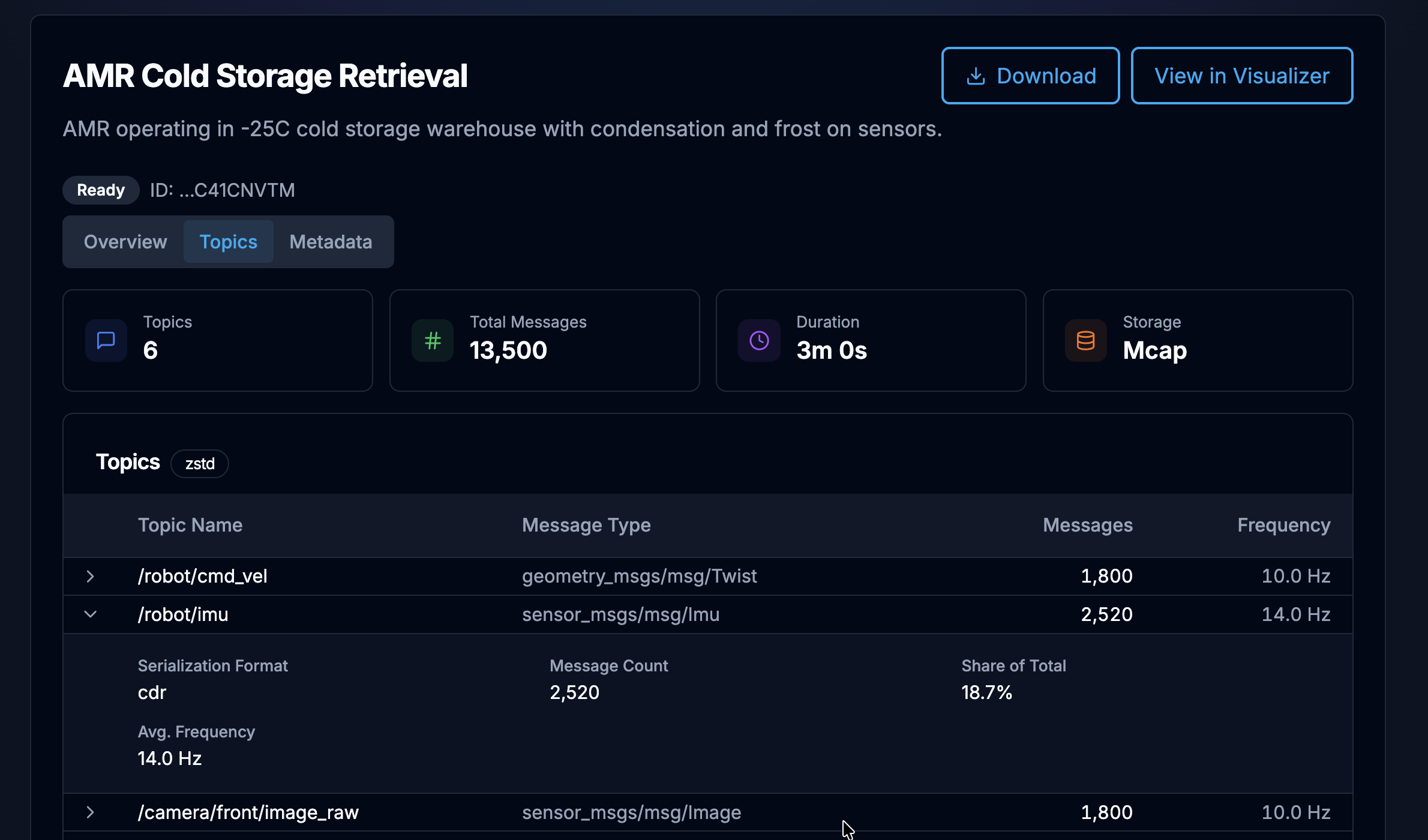
ROS Bag Library Management
Dive deep into ROS bag data with rich metadata and per-topic analytics, powered by built-in visualization.
Advanced Querying & Intelligent Filtering
Go beyond search with condition-based filtering across bags and experiments. Combine metadata, tags, and attributes to instantly pinpoint the right data.

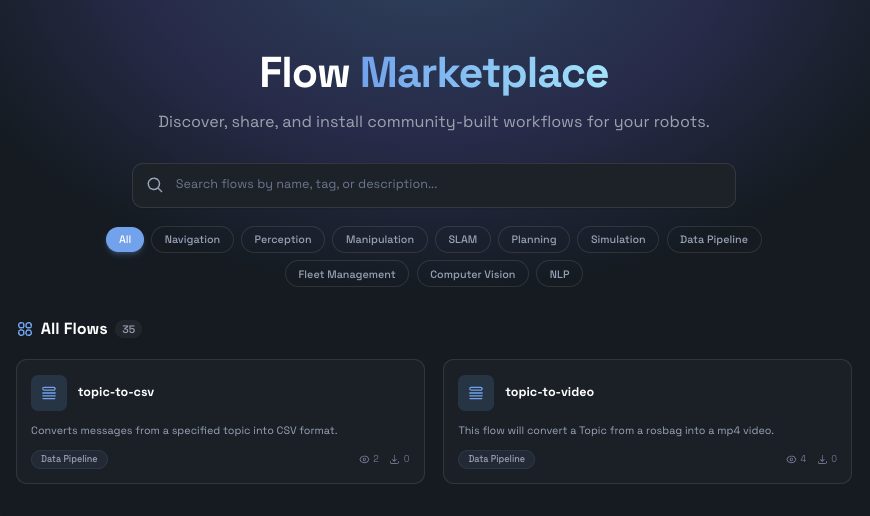
Library of Processing Nodes
A catalog of reusable containerized actions (built-in and custom) that operate on bags or experiments — topic analysis, stats generation, data transformation. Browsable via an integrated marketplace.
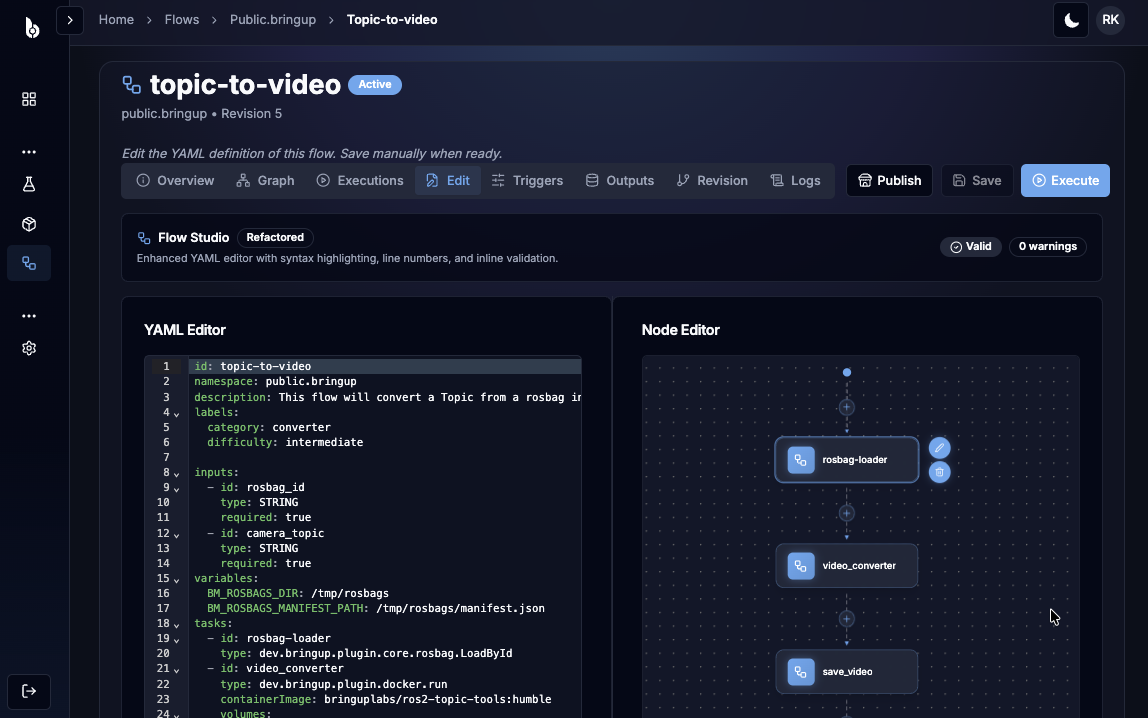
Post-Processing Pipelines
Chain custom processing nodes into repeatable workflows. Run calibration, object detection, map generation, or any ROS-compatible workload on stored data — triggered manually or on ingest.
Self-Hosted Workers
Run data processing locally by attaching your own workers, and scale seamlessly on your own infrastructure.
Ready to take control of your data?
Join robotics teams already using BringUp Data to move faster.
Start Building for Free